Цифровой двойник плотных скоплений хаотически движущихся объектов разрабатывают для задач навигации роботов студенты НИТУ «МИСиС», ИТМО и МФТИ. Он будет представлять собой веб-сервис с применением графовых нейронных сетей и позволит изучать физику толпы, законы роевого поведения у животных и принципы движения «активной материи». Эти данные активно требуются для обучения роботов-курьеров, беспилотников и других автономных устройств, работающих в условиях многолюдных пространств. Первые результаты опубликованы в журнале Journal of Physics: Conference Series.
Если при движении в потоке людей в метро мы начинаем фокусировать взгляд на ком-то из встречных, мы обязательно остановимся в середине толпы и с кем-то столкнемся. Когда мы расслабленно, «интуитивно» идем сквозь толпу, то безошибочно выбираем нужную траекторию и лавируем в потоке, никого не задевая. И это умеет почти каждый человек. Так происходит потому, что мозг работает, как сложная нейросеть. Незаметно для сознания он использует накопленные за годы интуитивные знания, быстро просчитывает меняющиеся условия и выбирает оптимальный путь.
Современным инженерам очень важно понять, как именно работает эта нейросеть, чтобы перенять ее принципы и интегрировать их в цифровую среду. Задача навигации роботов в плотных скоплениях (людей, машин, других роботов и т.д.) с каждым годом становится всё актуальнее. При этом, для успешного управления устройствами необходимо отслеживание и экстраполяция траектории каждого отдельного агента в таких скоплениях, что само по себе является сложной задачей.
Подобные системы можно эффективно описывать статистически как «активную материю», в которой каждая частичка сама закачивает энергию в систему, и успешно моделировать такую материю с помощью ансамблей хаотически движущихся роботов — например, имитировать поведение стаи птиц или косяка рыб. Для этого нужно создать симуляцию активной материи, т. е. сгенерировать роевое поведение.
Для реализации подобных систем роевой робототехники многочисленным лабораториям по всему миру необходимы большие «скопища» движущихся по простым законам роботов — как платформы для экспериментальной симуляции физики толпы. Однако проведение подобных экспериментов требует значительных ресурсов, и доступно не всем научным группам.
«Реализация подобной экспериментальной платформы требует компетенции в схемотехнике, а для создания достаточного количества структурно однородных роботов необходимы значительные финансовые затраты. В качестве альтернативы мы предлагаем создание цифрового двойника экспериментальной установки, позволяющего как исключить затраты на её физическую реализацию, так и ускорить и автоматизировать процесс постановки экспериментов. Возможность эффективного построения подобного программного обеспечения подтверждается недавними применениями графовых нейронных сетей в схожих задачах, включая симуляции гидродинамики», — рассказал лидер студенческого научного коллектива, выпускник кафедры «Инженерная кибернетика» НИТУ «МИСиС» Вадим Порватов.
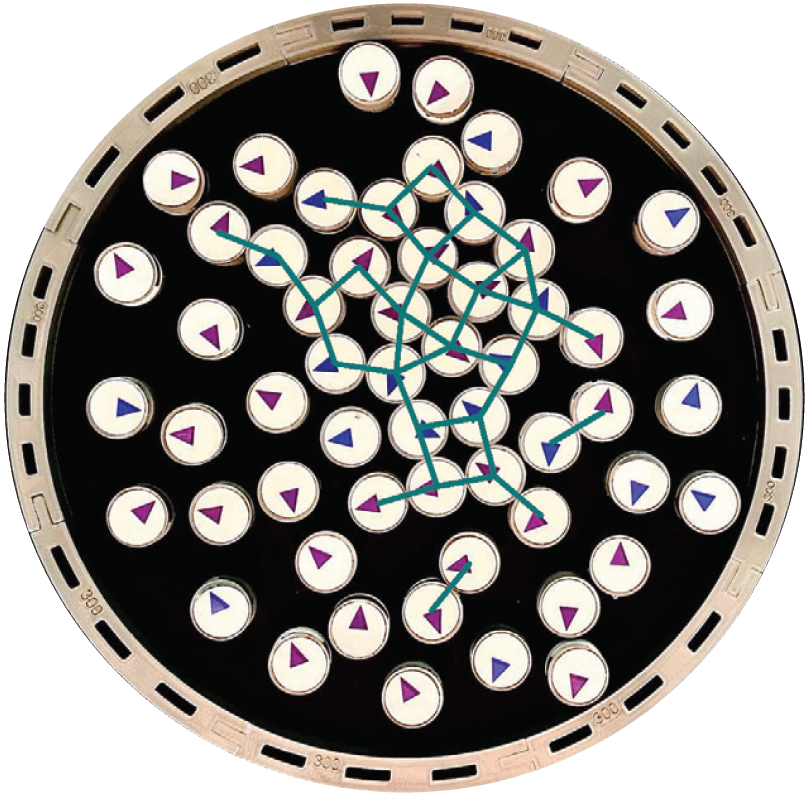
По словам разработчиков, в качестве источника данных для нейросетевого алгоритма используется собранная командой проекта экспериментальная установка, состоящая из 100 движущихся роботов. Движение системы записывается с помощью видеокамеры. В качестве основного инструмента отслеживания индивидуальных траекторий будут применены алгоритмы, предоставляемые библиотекой OpenCV. Информация о конфигурации установки вместе с полученными в результате движения роботов траекториями будут использованы для обучения графовой нейронной сети.
«Разработанная нейронная сеть позволит научным группам существенно упростить процесс изучения физических процессов в плотных скопления хаотически движущихся частиц, и может поставляться как продукт. Извлечение всех координат и скоростей роботов позволит получить исчерпывающее описание процессов, происходящих в системе, в том числе, информацию о фазовых переходах и кластеризации роботов», — пояснил соавтор исследования, аспирант Физического факультета ИТМО Никита Олехно.
Использование цифрового двойника позволит проводить отраслевые исследования, связанные с навигацией в хаотических окружениях. К примеру, виртуальные симуляции уже применяются компанией NVidia для отработки алгоритмов навигации беспилотных автомобилей. Результаты проекта могут быть использованы для обучения алгоритмов управления наземными дронами, перемещающимися в плотных людских потоках. Подобные симуляции могут быть особенно полезны для тестирования роботов-курьеров.
«На данный момент собрана довольно сложная экспериментальная установка, которую мы и будем дальше использовать для создания цифрового двойника», — подчеркнул Никита Олехно.
Проект стал победителем конкурса студенческих научно-исследовательских работ НИТУ «МИСиС» «турНИР» и получил финансирование в размере 500 тысяч рублей на реализацию.